Los motores eléctricos de potencia superior a 700 W transforman aproximadamente el 75 % de la energía eléctrica en la industria y el comercio, empleándola para accionar bombas, ventiladores, ascensores, grúas y otras máquinas; y se podrán encontrar los siguientes tipos de motores:
• Motores de corriente continua.
• Motores de corriente alterna.
• Síncronos.
• Asíncronos o de inducción.
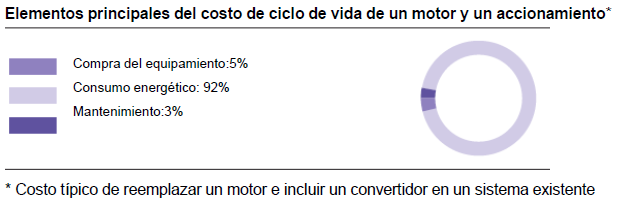
Similar a lo que comentamos anteriormente en los sistemas de aire comprimido, en los motores el costo operacional suele ser superior al de adquisición. Dependiendo del tiempo de funcionamiento, de la potencia y de su rendimiento, un motor puede costar en consumo energético de 25 a 150 veces su valor de compra.
Factor de carga
El uso racional de energía en los motores eléctricos implica utilizarlos solo el tiempo que sea necesario de acuerdo a las condiciones de producción; para ello hay que tener en cuenta dos aspectos fundamentales: rendimiento y factor de carga.
El rendimiento de los motores se calcula como🡪 n =Potencia mecánica útil / potencia eléctrica
El Factor de carga será igual a la 🡪 [potencia medida (kW)/0.746] / [Potencia nominal (HP)/eficiencia nominal]
Ejemplo: encontrar el factor de carga de un motor eléctrico trifásico cuya potencia y eficiencia nominal, obtenidos de la placa del motor, son 20 HP y 85% respectivamente, sabiendo que realizó una medición con un analizador de redes trifásico de la potencia utilizada a pleno trabajo del equipo, obteniéndose un valor de 8.13 kW.
Factor de carga = (8.13 kW / 0.746) / (20 HP / 0,85) = 46.32 %
Del resultado anterior se puede concluir que el motor trabaja a un reducido factor de carga, lo cual reduce la eficiencia de generación de trabajo y produce un bajo factor de potencia.
Motores de Alta Eficiencia
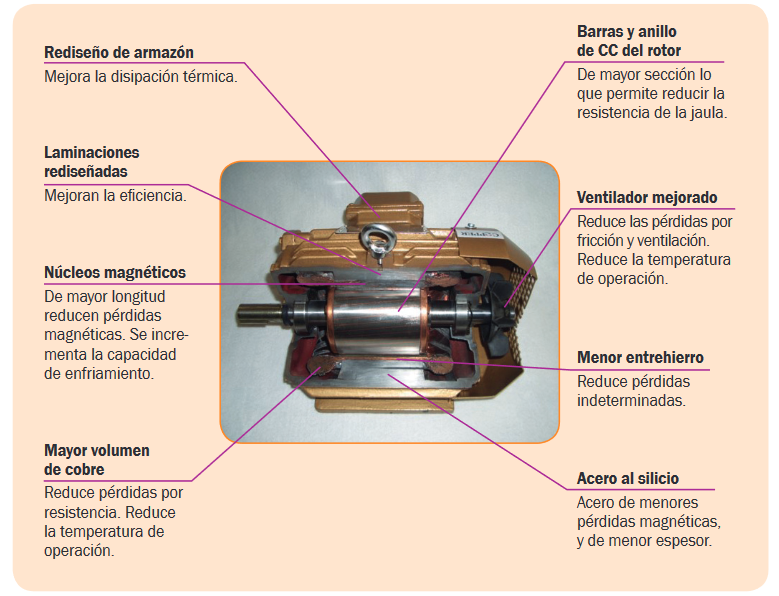
La tecnología de fabricación de motores eléctricos ha evolucionado mucho en los últimos años. Entre las principales características de fabricación de los motores de alta eficiencia se detallan:
La viabilidad económica de cambiar motores estándar por motores de alta eficiencia depende de manera muy significativa del tiempo de utilización, del factor de carga, del porcentaje de rendimiento incrementado, de la potencia del motor y del mayor costo de los mismos.
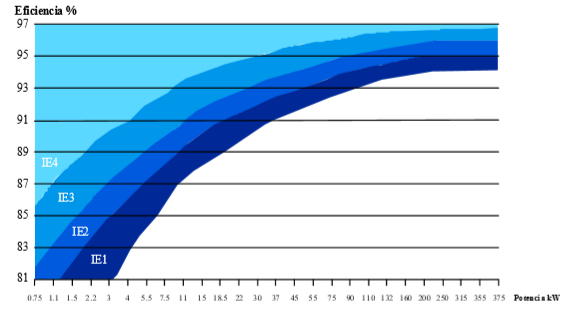
Dada la diversidad de normativas para la clasificación de la eficiencia de motores, en 2008 la International Electrotechnical Comision (IEC) publicó la norma IEC 60034-30 (Máquinas eléctricas rotativas – Parte 30: Clases de eficiencia de los motores de inducción monofásicos, trifásicos y de jaula, código IE). De este modo se impuso un nuevo sistema de clasificación de eficiencia que unificó las definiciones de la CEMEP y NEMA. La clasificación IEC considera: Standard Efficiency (IE1), High-Efficiency (IE2) y Premium Efficiency (IE3).
Por otro lado, es importante tener en cuenta que el mayor rendimiento del motor se encuentra cuando el equipamiento está trabajando entre un 70% y un 90% de factor de carga, por lo que la potencia nominal debe estar entre un 70% y un 90%.
Otras ventajas que tienen los motores de alta eficiencia, además de la mejora de eficiencia, son:
Ejemplo sustitución de motores
Se desea evaluar el reemplazo de un motor antiguo de 20HP (motor 1) que funciona 24hs del día 350 días al año (8400 hs/año) y eficiencia al 100% de carga: 85%. La opción que se tiene en vista es un motor IEC de 20 HP (motor 2) con eficiencia al 100% de carga de 90,2%.
Ahorro= (PC1- PC2) x N(horas) x C($/kWh)
Siendo PC = P(kW) / eficiencia
PC1 = Potencia consumida del motor 1 (motor antiguo) en kW
PC2 =Potencia consumida del motor 2 (motor nuevo “eficiente”) en kW
N(horas) = número de horas trabajadas en el año
C($/kWh) = costo del kWh
Potencia en kW = Potencia en HP x 0,746.
Ahorro (ejemplo con un costo final de 1,83 $/kWh): (15 kW/0,85) – (15 kW/0,902) x (24 h/día x 350 días/año) x 1,83 $/kWh = $ 15.600 /año
Correas de transmisión
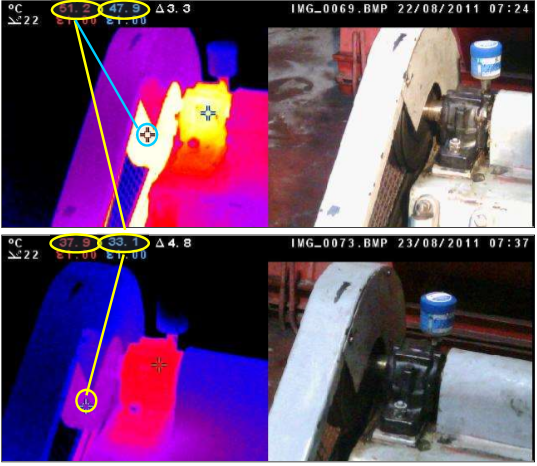
Es muy común utilizar en las industrias correas de transmisión en los motores. Se recomienda verificar su funcionamiento ya que, por desgaste, mala alineación o tensión puede generar consumo excesivo de energía. En la imagen situada debajo se observa que con una simple alineación de la correa las temperaturas se reducen de 51°C a 33°C. Esto a su vez genera una reducción del consumo de corriente.
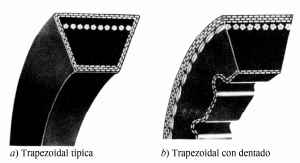
Las correas trapezoidales ofrecen la ventaja de una mayor capacidad de transmisión de potencia por unidad de sección de la misma (ya que incrementan la superficie de contacto en relación a las correas planas), pero lo hacen a costa de una eficiencia más baja debido a la fricción y al proceso de encaje y desencaje que se sucede en las poleas.
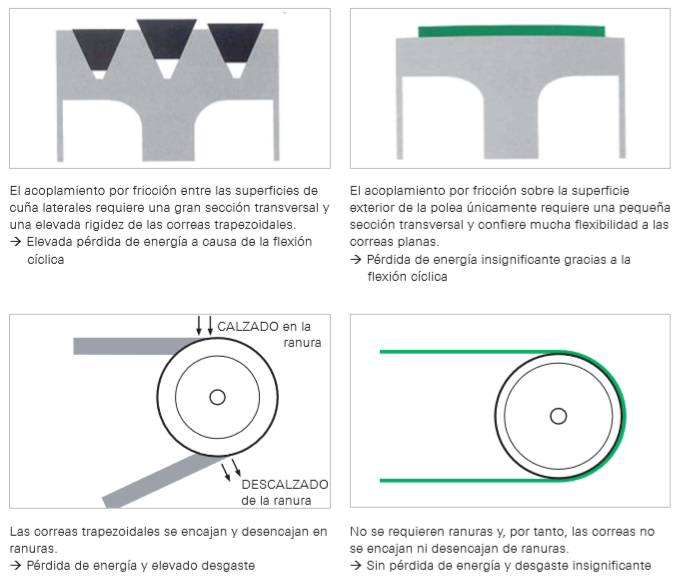
Existen sin embargo correas que optimizan esta condición, con pequeñas ranuras en la parte interior de la misma, que facilitan la flexión de las fibras internas (solicitación de compresión sobre las poleas) y que mejoran la disipación térmica. Las correas trapezoidales dentadas, como la de la figura, se usan con poleas normales para correas en V. Los dientes dan mayor flexibilidad a la correa y mayor eficiencia, en comparación con las correas normales ya que, además de mayor flexibilidad la disipación de calor, es más eficiente. Está empíricamente comprobado que pueden conseguirse, dependiendo del ámbito de trabajo, coeficientes de mejora de entre un 5% y un 7% sobre el total de potencia absorbida del motor, al pasar de unas a otras.
Por otro lado, ocurre también una situación de disminución de potencia transmitida (que se pierde en vibraciones que desgastan prematuramente los rodamientos donde montan los ejes de conductores y conducidos, y en disipación de calor) cuando las correas no se encuentran con la tensión adecuada.
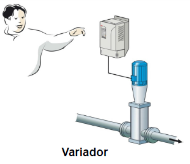
Los convertidores/variadores de velocidad/frecuencia de corriente alterna (también llamados VSD) tienen como principal función variar la velocidad de giro de los motores de inducción trifásicos en aplicaciones donde se necesite una velocidad distinta durante el funcionamiento. En los motores de inducción de corriente alterna resulta complicado controlar la velocidad y el par.
La velocidad de un motor es aproximadamente proporcional a la frecuencia de la alimentación. Teniendo en cuenta que el valor de K depende del diseño mecánico del motor, se puede aplicar la siguiente ecuación de manera simplificada:
n ≈ K x f
Lo que significa que se debe cambiar la frecuencia de alimentación del motor si se quiere cambiar la velocidad de giro del mismo. Debe tenerse en cuenta que el flujo magnético en el motor es proporcional a la relación entre la tensión y la frecuencia de alimentación:
ϕ ≈ V / f
Con el fin de evitar la saturación o una mínima magnetización del circuito magnético, el flujo en el motor debe mantenerse constante. Es decir, es necesario variar simultáneamente la tensión y la frecuencia de alimentación del motor. El par del motor de inducción es proporcional al flujo magnético:
M ≈ K * ϕ
El par del motor depende directamente del flujo magnético del motor que se genera con la tensión y la frecuencia de alimentación al motor.
El VSD transforma la señal senoidal de tensión de alimentación de amplitud y frecuencia fija en una onda de salida trifásica de tensión y frecuencia variable. Los VSD para motores de CA, por lo general, convierten primero el suministro de CA en CC mediante el uso de un rectificador y, posteriormente, lo convierten una vez más utilizando un puente inversor, en una fuente de frecuencia y tensión de CA variables. La conexión entre el rectificador y el inversor se denomina circuito intermedio.
En aplicaciones donde no es necesario la variación de la velocidad del motor por el tipo de aplicación, en las cuales se arranca el motor y funciona a su velocidad nominal durante todo el proceso, la utilización del variador de frecuencia no tiene mucho sentido ya que su principal característica o utilidad no se aprovecharía, aunque a nivel de ahorro energético hay en ciertos casos en los cuales podría interesar la utilización de un variador debido a que en el arranque del motor el consumo o corriente de arranque es muy inferior al de un arranque directo del motor o un arranque mediante arrancador estrella-triangulo/arrancador suave ya que el propio variador de frecuencia limita esta corriente entregada al motor, debido a que utiliza un arranque progresivo con una aceleración o rampa suave que puede ser fijada a un valor de tiempo concreto. La instalación de variadores de frecuencia en este caso no es habitual, pero para grandes potencias (>100kW) y aplicaciones donde no es restrictivo el tiempo de arranque del motor podría compensar el costo adicional de éste frente al ahorro energético derivado del menor consumo en el arranque. Este menor pico de intensidad en el arranque proporcionado con el convertidor de frecuencia, gracias al control del arranque, conlleva una reducción en la infraestructura eléctrica y las pérdidas de la red de alimentación.
La principal utilización de los convertidores de frecuencia es en aplicaciones donde la velocidad del motor no es contante ya que la aplicación y la maquina accionada por el motor tienen un perfil de funcionamiento diferente a lo largo del tiempo con unos requerimientos de par o potencia variables.
En las aplicaciones industriales de motores, existen cargas de par constante (la potencia varía linealmente con la velocidad) y otras de par variable (la potencia varía con el cuadrado de la velocidad), a saber:
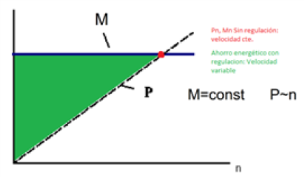
Par constante:
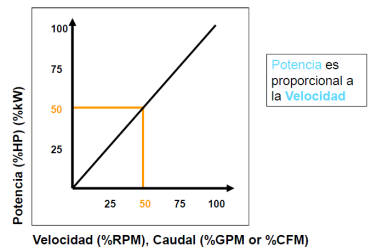
En aplicaciones de par constante, como por ejemplo cintas transportadoras, la característica de la carga requiere que el par se mantenga contante en el rango de velocidad de funcionamiento y la potencia consumida es proporcionalmente lineal a la velocidad, por lo que la energía consumida aumenta según se incrementa la velocidad, en este caso el potencial de ahorro de energía también existe si regulamos la velocidad del motor con un convertidor de frecuencia que acciona la cinta transportadora en función de las necesidades del sistema, frente a un accionamiento a velocidad constante que siempre consumirá la potencia nominal dando el par nominal a la velocidad nominal.
Si el sistema está dimensionado para transportar una cierta cantidad de material entregando un determinado par pero puede transportar esa carga en un tiempo inferior, es decir a menor velocidad, la potencia consumida por el motor será inferior por lo tanto podremos ahorrar energía.
Par variable
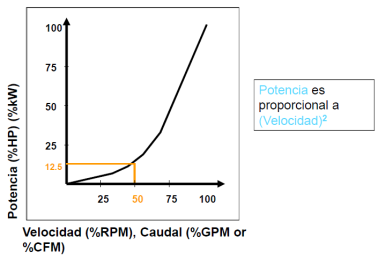
En las aplicaciones de par variable, se respeta que p1p2=n13n23=q13q23, donde:
Estas son las aplicaciones de mayor interés a nivel industrial, ya que pequeñas o moderadas modificaciones en la velocidad de operación del motor pueden traer grandes ahorros energéticos asociados a la carga del mismo en términos eléctricos.
Aplicación en Control de motores de Sistemas de Climatiza (HVAC)
Menos consumo energético del sistema de refrigeración, consiguiendo una mejor eficiencia horaria global de los motores principales involucrados en el funcionamiento del sistema. También se obtienen otras ventajas como prolongación de la vida útil de las partes mecánicas, reducción de las intervenciones de mantenimiento, protección contra fluctuaciones de tensión, etc.
Aplicación en control de Compresores
Menor consumo y mejor control del sistema de generación de aire comprimido, controlando principalmente el funcionamiento del motor principal del equipo
Aplicación en control de Bombas
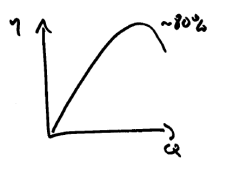
Se utiliza para regulación de velocidad en función del caudal y presión necesarias de proceso. La eficiencia de las bombas varía con el porcentaje del caudal que utilizan, normalmente cerca del 80% del caudal se encuentra el máximo rendimiento. Para operaciones industriales, estos caudales suelen variar entre el 40% y el 80% del nominal, dependiendo de los criterios de dimensionamiento. Es gracias a la regulación de velocidad mediante VSD que se puede trabajar siempre en el punto óptimo de rendimiento.
Por otro lado, también se verán ventajas en los siguientes puntos:
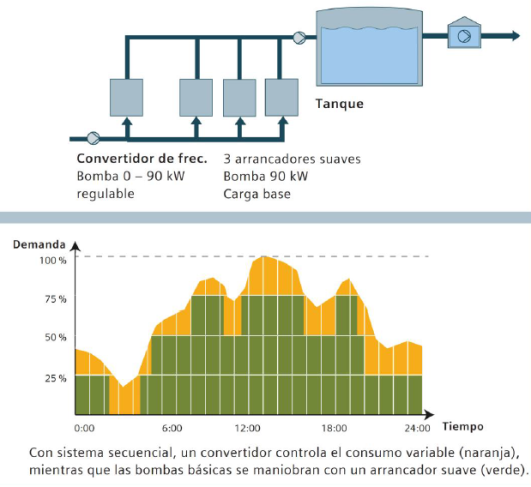
Un ejemplo de este último punto sería una aplicación de bombeo de agua con control en cascada (conexión secuencial) de las bombas que componen el sistema, donde se accionan varias de las bombas en función de la demanda de caudal del sistema a través de arrancadores suaves para hacer un ajuste “grueso” (demanda básica), y una de las bombas se acciona a través de un variador de frecuencia para hacer el “ajuste fino” (demanda variable). Esta solución es óptima para ajustarse a los cambios de carga, reduciendo el número de arranques y paradas en la instalación, y tiene una elevada eficiencia energética debido al ahorro de consumo por la reducción de los picos de corriente en el arranque de hasta un 60%.
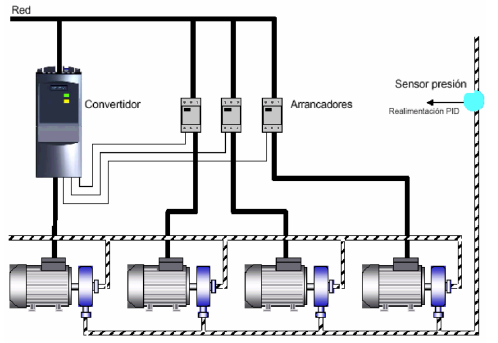
Donde el conexionado típico sería como el que se muestra en la siguiente figura:
Sistemas de Control típicos
En un sistema de control On-Off, existe una secuencia de apagado de los equipos de forma manual o automático, pero que saca de servicio selectivamente parte de la potencia instalada relacionada al trabajo de bombeo / ventilación. Este aprovechamiento no resulta óptimo a nivel energético ya que, como veremos más adelante, existe una capacidad ociosa de la bomba / ventilador apagado que redundaría en la posibilidad de bajar la velocidad de operación de los otros equipos en funcionamiento.
En un sistema de control por estrangulamiento, se coloca una válvula (en el caso de una bomba) o un damper (en el caso de un ventilador), que restringe el paso de fluido a lo largo de la tubería / cañería de impulsión o de succión. Esta válvula genera una restricción en el paso de fluido que regula el caudal de salida o entrada, convirtiendo la energía cinética del mismo en calor que se disipa (y consecuentemente, se pierde). Este método de regulación no resulta eficaz, siendo que no maximiza el consumo energético del sistema, y en muchas ocasiones requiere de operación manual que resulta engorrosa y tiene un costo asociado, sin mencionar los costos operativos de los mantenimientos asociados a estos equipos de estrangulación. En estos casos, presión y caudal de aire varían según la curva característica del ventilador / bomba, la presión y caudal del sistema completo también varían en función de las necesidades o la regulación según la curva de la carga o curva resistente, así como la potencia absorbida por el ventilador /bomba en cada uno de esos puntos:

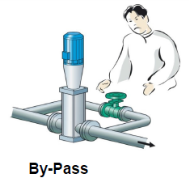
En el método de regulación por By-Pass, se coloca un cuadro de by-pass a la salida de la bomba / ventilador (este sistema es más utilizado en bombeo), que es conectado con la succión utilizando una válvula intermedia de regulación de caudal. Se trata de un método con el mismo principio de funcionamiento que el anterior, pero con menores pérdida de carga asociada debido a que parte del caudal excedente es bombeado a la entrada y reduce el salto de presión necesario para el trabajo de la bomba. No obstante, tampoco es un sistema de regulación que optimice el consumo energético del sistema, ya que parte del trabajo de la bomba es desperdiciado en la recirculación de fluido, y también existe una pérdida de calor asociada al estrangulamiento del fluido producido en la válvula.
Por último, existe el sistema de regulación de caudal a través de la regulación de velocidad del motor de accionamiento de la bomba / ventilador por medio de un VSD. Este sistema optimiza el consumo de energía, sobre todo (como comentamos anteriormente) en aplicaciones de par variable como es el bombeo / ventilación. Los sistemas de variación de velocidad permiten la operación óptima del ventilador/bomba cumpliendo con los requerimientos del sistema, variando la velocidad del motor para entregar el caudal de aire necesario, y por consiguiente adaptando el consumo de energía del mismo
Ejemplo práctico 1 – Bombas
Situación 1 🡪 3 bombas instaladas en paralelo, cada una de ellas con arranque estrella / triángulo que permite estar detenida o bien funcionar al 100% de su velocidad
La condición de proceso pide 2 en operación y 1 en espera. Entonces el caudal necesario resulta en 150 l/s, y el consumo de energía 150 kW.
Sabiendo que p1p2=n13n23=q13q23, podríamos tener las 3 bombas en operación, y entonces el caudal requerido para cada bomba será de 50 l/s (para totalizar 150 l/s requeridos por el proceso).
Si entonces planteamos que n2 = A x n1, donde A resulta ser el coeficiente porcentual de velocidad con respecto a la situación 1 (2 bombas en operación, una de back up detenida), tenemos que:
n13A3 × n13=753503 🡪 1A3=421.875125.000 🡪 A = 66,66%.
Por lo tanto, podemos proponer trabajar con 3 bombas al 70% de su velocidad nominal (para cumplir el caudal en todas las condiciones de proceso, aumentando de 50 l/s a 52,5 l/s cada bomba). Si entonces planteamos que p2 = B x p1, donde B resulta ser el coeficiente porcentual de potencia con respecto a la situación 1 (con el objetivo de averiguar la nueva potencia involucrada, y calcular el ahorro), tenemos que:
p1B × p1=75352,53 🡪 1B=421.875144.703 🡪 B = 34,30%.
Entonces en la Situación 1 teníamos 2 bombas funcionando a plena potencia, totalizando 2 x 75kW = 150kW. Luego de la instalación de VSD, y con 3 bombas operando cada una al 34,30% de potencia, tendremos 3 x 34,30% x 75kW = 77,17kW.
De esta forma, el ahorro generado será de 77,17kW / 150kW = 51%.
Ejemplo práctico 2 – Ventiladores
Situación 1 🡪 6 ventiladores instalados de 1kW de potencia cada uno, en donde el flujo necesario que requiere el proceso es el 50% de la capacidad total del flujo nominal de las paletas, por lo tanto siempre hay tres ventiladores en funcionamiento y 3 detenidos esperando arranque:
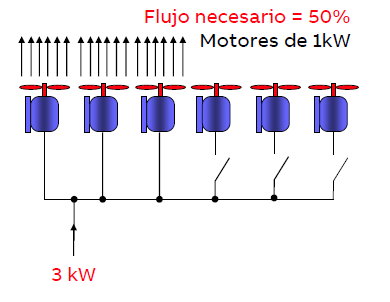
Sabiendo que p1p2=n13n23=q13q23, podríamos plantear la situación de tener los 6 ventiladores trabajando, y para respetar el caudal total requerido por el proceso (para esta situación tendremos el doble de ventiladores en paralelo, por lo que el caudal unitario de cada uno será la mitad) tendremos que:
q1 / 2= q2 🡪 n13n23=q13q23=2 × q1q1 donde n1=2n2, de donde se desprende que la velocidad en la nueva situación será de la mitad que en el comienzo del ejemplo. De esta manera, y utilizando la primera ecuación nuevamente, calcularemos la potencia individual para cada ventilador:
p1p2=n13n123= 23 × n13n13 🡪 p1=8 × p2, de donde se desprende que la potencia individual de la nueva situación será 1/8 de la potencia inicial. Entonces la potencia de cada ventilador será de 1kW / 8 = 0,125kW. Si tenemos 6 ventiladores instalados, la potencia total entonces será de 6 x 0,125kW = 0,75kW.
De esta forma, el ahorro generado será de 0,75kW / 3kW = 75%.